3 JOURS D’ESSAI ROBOTIQUE DANS LE GERS
Publié le
En partenariat avec le constructeur Agrointelli et Vantage Atlantique Méditerranée, la Frcuma Occitanie et la Fdcuma Gers Hautes-Pyrénées ont réalisé un semis de carotte porte-graine chez Eric Encausse, agriculteur gersois à Barran. Une première dans le secteur ainsi que pour la Cuma de Rozes qui a effectué cet essai dans le cadre d’un GIEE.


Après une première démonstration du robot aux adhérents de la Cuma de Rozes il y a 2 ans à l’occasion d’une journée de l’innovation en grandes cultures, Robotti du constructeur Agrointelli revient dans le Gers pour un essai grandeur nature.
L’objectif : tester le robot en conditions réelles pour un semis et évaluer la faisabilité de partage d’un tel outil en Cuma.
Pour cela, trois parcelles ont été sélectionnées afin d’entrevoir la logistique d’une parcelle à une autre.
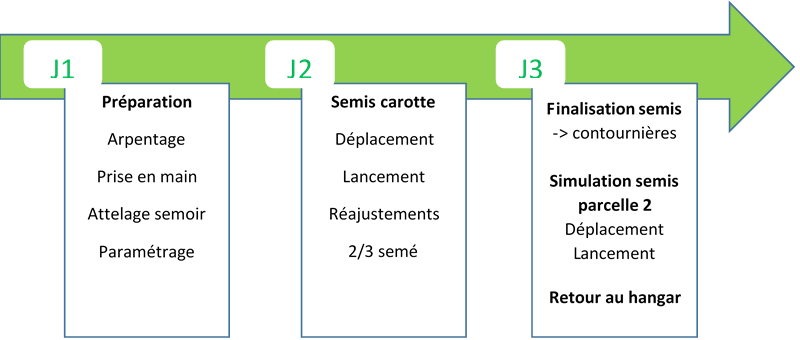
Le robot a réalisé un semis de carotte porte-graine sur une parcelle de 3,70 ha avec un semoir monograine Monosem de 3 m de large (5 rangs à 60 cm d’écartement). Il a pu évolué en conditions difficiles avec une pente entre 20 à 30 %, une première pour le robot qui a été challengé ! Après quelques ajustements (vitesse, sens d’avancement, un passage un rang sur trois) et un reparamétrage réalisé en direct avec la hotline au Danemark, la réactivité du constructeur a permis de relever le défi.
Caractéristiques du robot :
- Poids : 3100 kg
- 2 moteurs diesel Kubota de 75ch
- Transmission hydraulique
- 4 roues motrices, 2 roues directrices
- Prise de force au régime de 540tr/min
- Attelage trois points
- Capacité de relevage : 750 kg
- Largeur de travail : 3 m
Pour Eric Encausse, l’essai est assez concluant dans l’ensemble. ‘On a pu voir évoluer le robot en conditions réelles d’utilisation et pas seulement dans un champ plat. Le semis est réalisé avec précision, l’outil tient bien le cap des lignes définies lors du paramétrage du travail. Des améliorations sont encore à prévoir, pour les contournières notamment, mais c’est ça l’avantage de ce type d’essai, on participe quelque part à la R&D’.
La robotique amène une nouvelle façon d’appréhender le travail à réaliser. ‘Nous allons devoir nous adapter’, explique Florent Georges, conseiller agroéquipement de la Fdcuma du Gers. ‘Il faut prendre en compte cette automatisation du travail, être davantage dans la planification et l’anticipation des travaux’. Le paramétrage du robot est en effet une étape clé qu’il ne faut pas négliger, explique Eric. ‘Tout se fait depuis le logiciel (planification des lignes AB, vitesse d’avancement, largeur outil, …). C’est assez complexe, il faut avoir quelques notions.’

Technologie prometteuse, la robotique en grandes cultures est-elle adaptée à toutes les conditions ? Durant ces 3 jours d’essais, on a pu voir que la robotique n’était pas si automatique. Le travail ne se fait pas tout seul. Il faut paramétrer le robot. C’est une étape importante et qui prend du temps. L’opérateur doit ensuite gérer la logistique et les manœuvres (chargement, déchargement de la remorque, déplacements d’une parcelle à l’autre). Une fois au champ, l’opérateur doit déclencher le travail à réaliser. Quand tout va bien, il faut environ 15 minutes pour démarrer le travail mais quand on ne capte pas le signal RTK, on perd vite du temps. Sans compter que lorsque le robot s’arrête (rencontre d’un problème, obstacle), il faut revenir le redémarrer. Pour le semis, il faut notamment revenir recharger le semoir.
La question se pose donc pour des systèmes en grandes cultures avec des parcelles de petite et moyenne taille. Quel est le gain de temps réel pour l’agriculteur ? Compte-tenu du prix de la technologie (230 000 € pour un robot tel que Robotti), comparé à un tracteur de même puissance (150 CV) avec chauffeur, est-ce rentable ? Si oui, avec quelles cultures ?
Comme on a pu le constater après ces 3 jours d’essai, la robotique ne permet pas de s’abstrait de l’homme, et d’autant plus pour du semis. Tout comme pour le robot de traite, l’astreinte est différente.